
Die Weiterentwicklung der aktuellen chirurgischen Möglichkeiten hat die Neurochirurgie des 21. Jahrhunderts nachhaltig beeinflusst. Erst durch diesen Einfluss wurde überhaupt der Begriff der "computer-assisiteren (Neuro)-Chirurgie (CAS)" etabliert. Unter Verwendung der BrainSuite stellt die intraoperative Bildgebung ein essentieller Bestandteil der universitären Neurochirurgie am Universitätsklinikum Augsburg dar. Der Arbeitsbereich der "Robotik" wird in den nächsten Jahren sukzessiv aufgebaut.
Intraoperative Navigation spielt heutzutage sowohl in der gesamten neurochirurgischen Tumorchirurgie, als auch in der Wirbelsäulenchirurgie eine entscheidende Rolle. Mithilfe unseres intraoperativen CT- und unserer 3D-Röntgen basierten Navigationssysteme können wir eine zielsichere Implantatlage und eine möglichst radikale, aber auch sichere Tumorentfernung verbunden mit einer deutlich verkürzten OP-Dauer gewährleisten. Eine weitere Entwicklung in diesem Zusammenhang bringt die Anwendung eines semiautomatischen Robotikarms für das ganze Spektrum der Neurochirurgie (zum Beispiel Tumorbiopsie am Gehirnoder die Implantatanlage an der Wirbelsäule) eine noch höhere Patientensicherheit. Hiermit soll in naher Zukunft an unserer Klinik der operative Ablauf optimiert werden.
Schrauben-Stab Systeme an der Wirbelsäule können mithilfe der Navigationssysteme bei der degenerativen, onkologischen, septischen und der Deformitätenchirurgie zielsicher angebracht werden. Nach minimalinvasiver Eröffnung der harten Muskelhaut (Muskelfaszie) am Rücken wird ein Referenzstern als Marker am Dornfortsatz eines Wirbels festgeschraubt. Eine CT- oder Röntgensequenz wird daraufhin angefertigt. Mithilfe von speziellen Instrumenten werden anatomische Landmarken an der Wirbelsäule manuell im Navigationssystem überprüft. Anschließend kann mit einer Bohrhülse in jedem Wirbel anhand einer navigationsgestützten Trajektorie analog wie bei einem GPS System vorgebohrt und ein Kirschnerdraht angebracht werden. Entlang der Kirschnerdrähte können nun die Wirbel verschraubt werden. Eine zusätzliche Option ist die Verwendung von bereits präoperativ erfolgten CT-Aufnahmen zum sogenannten Region Matching. Hierbei kann das Abfahren von mehreren anatomischen Punkten an der Wirbeloberfläche mit einem Navigationsinstrument die Navigation anhand der Vorbildgebung ermöglichen.
Eine weitere Alternative in nächster Zukunft soll ein Roboterarm bringen, welcher am OP-Tisch am Anfang der Operation angebracht wird und entweder eine vor der Operation bestimmte Trajektorie anfährt oder im anhand der Navigation am besten geeigneten Trajekt ausgerichtet wird. Der Roboterarm dient dabei als Zielvorrichtung, die eigentliche Bohrung wird weiterhin vom Chirurgen durchgeführt.
Anhand der Bildgebung, welche unsere Patienten mitbringen oder bei uns erhalten, können wir präzise Tumore, Infektionsherde oder Gefäßmissbildungen im Gehirn und krankhafte Veränderungen entlang der Schädelbasis vollständig entfernen.
Mittels Fibertracking lassen sich hierbei die wichtigen Faserbahnen in der Bildgebung projizieren sowie der Bezug von verschiedenen Pathologien dazu visualisieren. Zudem ist eine Volumetrie von Pathologien mit exakter räumlicher Darstellung in der Bildgebung möglich. Mithilfe moderner Mikroskope lassen sich diese Strukturen sogar während der Operation im Operationsfeld des Chirurgen darstellen (Augmented Reality). Damit lässt sich die Orientierung verbessern und eine vollständige Entfernung von verschiedenen Hirn- und Schädelpathologien erreichen.
Während der Operation am Schädel wird der Kopf meistens in einer Halterung angebracht und festgehalten. Ein Navigationsstern wird an der Halterung als Referenzpunkt montiert und anatomische Punkte am Gesicht des Patienten mit einem Navigationsinstrument abgefahren. Hierbei kann die Navigation anhand der Vorbilder eine exakte Abbildung des Patientenschädels im Raum berechnen. Nun kann man sich zu jedem Zeitpunkt die Grenzen der zu entfernenden Pathologie mit einem Navigationsinstrument erkennen oder sich auch im Mikroskopbild projizieren lassen. Dies erleichtert die Entfernung beispielsweise eines Tumors unter dem Aspekt funktionell relevante Hirnzentren und –bahnen zu verschonen.

Drei-Dimensionale Planung via BrainLab Elements (R)

Neuro-navigierte Anlage einer Verschraubung an der Wirbelsäule.

Neuro-navigierte Schraubenanlage an der Wirbelsäule.

Neuro-navigierte Entfernung eines Hirntumors durch den Leiter der Neuro-Onkolgie Herrn Priv.-Doz. Dr. med. habil. Sommer
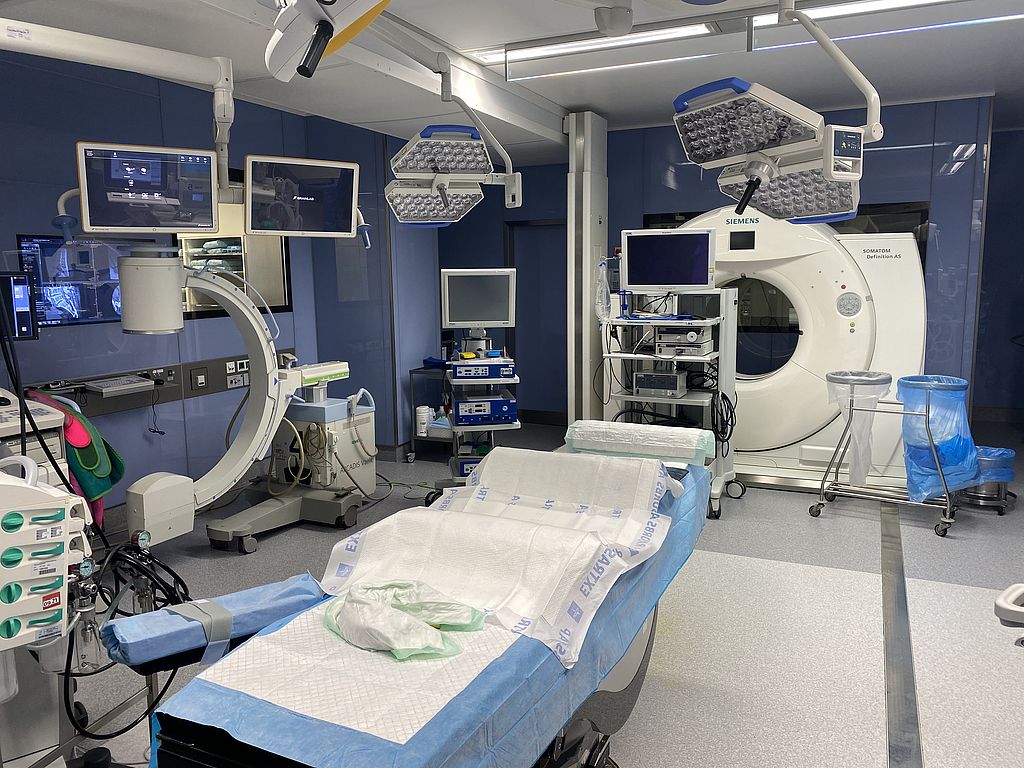
vorbereitete BrainSuite (speziell für die Neurochirurgie entwickelter OP-Saal mit intraoperativen CT / deckenmontierter Neuronavigation / integrierte Neuro-Endoskopie)

Endoskopische, neuronavigierte 360°-Stabilisierung
Operateuere: Priv.-Doz. Dr. med. habil. Shiban MHBA (komm. Direktor) und Dr. med. Stemmer (Leiter Wirbelsäulenchirurgie)

Minimal-invasive, Neuro-navigierte, rein-endoskopische Hirnblutungsentfernung (Schlüsselloch-Chirurgie)

Intraoperative Anwendung des neuen 4k-AEOS der Firma BBraun Aescualp am Beispiel einer komplexen spinalen Chirurgie
Operateur: Prof. Dr. Shiban (komm. Direktor)

minimal-invasive Resektion eines gutartigen Knochentumors an der BWS mit Unterstützung des intraoperativen CTs und der Neuronavigation
Operateur: Prof. Dr. Shiban (komm. Direktor)